
本套课程深蓝学院:自动驾驶控制与规划,课程官方售价999元,课程包含视频以及相关资料,共计35.16G,文章底部附下载地址。
课程从基础的车辆物理模型出发,通过对不同场景及应用下车辆模型的分析,详细闻述车辆控制学及路径规划的知识体系。通过将理论与实际车辆规划控制中的问题相结合,从而让大家达到融会贯通的效果,课程不仅会详细讲解主流的规控算法的原理,而且分享算法落地实践的经验,并通过丰富的Project让大家巩固课程中的所学。
课程特点:
1.扎实基础,析原理掌握;
2.控制与规划核心技术;
3.把理论应用于实战。
自动驾驶控制与规划 视频截图
自动驾驶控制与规划 视频截图
课程文件目录:V-4385:深蓝学院-自动驾驶控制与规划 [35.16G]
01-第一章自动驾驶规划控制概况
【仿真配置】lgsvl-ros.pdf
pncl1.pdf
第1节什么是无人车,自动驾驶的不同的等级.mp4
第2节无人车的基本组成部分以及功能介绍.mp4
第3节规划控制的基本组成.mp4
第4节课程结构-控制、规划.mp4
02-第二章车辆纵向控制
2.1.mp4
2.2.mp4
2.3.mp4
2.4.mp4
l2vehiclelongitudinalcontrol.pdf
作业.zip
03-第三章车辆横向控制
(organized)控制规划第一期第一次在线答疑问题收集-讲师返回.docx
1.lateralvehicledynamics.mp4
2.moderncontrol.mp4
3.lateralcontrolbasedonvehiclegeometricmodel.mp4
l3autonomousvehicle.pdf
第一次答疑.mp4
实践作业.zip
04-第四章车辆轨迹追踪的优化控制
1.lateraldynamicmodel.mp4
2.linearoptimalcontrol.mp4
3.离散化.mp4
4.基于lqr的轨迹追踪.mp4
5.基于preview的轨迹追踪.mp4
6.总结与对比.mp4
l4vehiclelateraloptimalmodel.pdf
第四章作业.zip
状态反馈.pdf
05-第五章基于mpc的车辆控制及轨迹规划
1.什么是mpc.mp4
2.mpc控制器.mp4
3.车辆运动模型构建.mp4
4.目标函数构建.mp4
5.不等式约束和松弛因子.mp4
6.主流求解器及mpc加速.mp4
l5vehiclemodelpredictivecontroller.pdf
第二次答疑.mp4
实践项目(选修).zip
06-第六章动作规划
frenet-cartesiantransformation.pdf
第二节基于随机采样的动作规划.mp4
第三节latticeplanner.mp4
第一节动作规划的任务以其基本概念.mp4
课件l6.pdf
作业.zip
07-第七章决策规划
基于学习的规划研究
chauffeurnet-learningtodrivebyimitatingthebestandsynthesizingtheworst.pdf
end-to-endinterpretableneuralmotionplanner.pdf
jointlylearnablebehaviorandtrajectoryplanningforself-drivingvehicles.pdf
1.决策任务的规划以其问题.mp4
2.基于有限状态机的决策规划(1).mp4
2.基于有限状态机的决策规划.mp4
3.行为树的决策规划方法.mp4
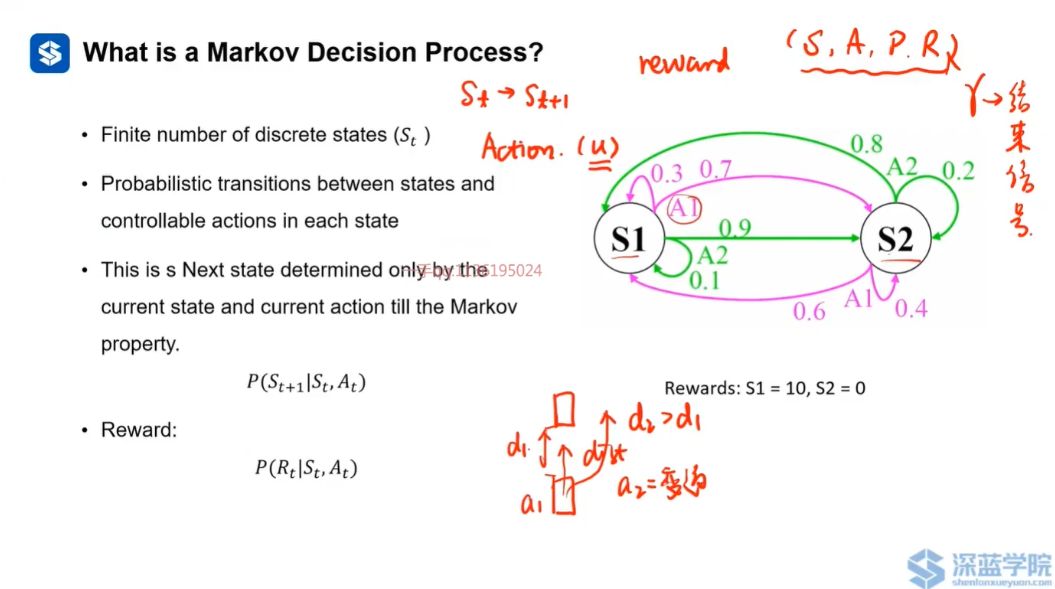
4.基于部分客观的markov决策过程1.mp4
4.基于部分客观的markov决策过程2.mp4
5.基于模仿学习的决策规划.mp4
6.总结.mp4
l7fsm_bt.pdf
l7learning-baseddecisionplanning.pdf
基于学习的决策规划背景知识.pdf
08-第八章路径规划
讲师答疑相关论文资料分享
chauffeurnet-learningtodrivebyimitatingthebestandsynthesizingtheworst.pdf
end-to-endinterpretableneuralmotionplanner.pdf
jointlylearnablebehaviorandtrajectoryplanningforself-drivingvehicles.pdf
motionplanningunderuncertaintyforon-roadautonomousdriving.pdf
softconstraintsandexactpenaltyfunctionsinmodelpredictivecontrol.pdf
theg-gdiagram链接地址.txt
新建文本文档.txt
1.路径规划的任务以及问题.mp4
2.dijkstra.mp4
3.astar.mp4
4自动驾驶中的路径规划.mp4
5在线答疑.mp4
l8missionplanning.pdf
自动驾驶控制与规划第一期第三次答疑问题收集-图南南22.8.14(讲师返回).docx
课前资料
lgsvl离线运行指南
image
image-20220629141534900.png
image-20220629141850235.png
image-20220629142442392.png
image-20220629142826614.png
image-20220629142845826.png
image-20220629143048821.png
image-20220629143211894.png
image-20220629143214912.png
image-20220629143337105.png
image-20220629143520074.png
image-20220629143717687.png
image-20220629143853564.png
image-20220629143904158.png
image-20220629144625986.png
规控课程仿真本例运行实例.md
ros安装参考资料
ros环境配置参考.pdf
ubuntu1804安装ros_melodic.pdf
ubuntu多个版本官方安装教程.pdf
2022控制岗位面试题梳理.pdf
开课仪式.mp4
课程介绍及基础资料.pdf
自动驾驶控制与规划第一期开课仪式.pdf
自动控制原理
(西工大)-第10节课3.3.4改善性能措施;3.4高阶系统动态性能3.5线性系统的稳定性分析(上).mp4
(西工大)-第10节课3.3.4改善性能措施;3.4高阶系统动态性能3.5线性系统的稳定性分析(下).mp4
(西工大)-第11节课3.6线性系统的稳态误差(静态误差)(下).mp4
(西工大)-第12节课3.6动态误差;3.7时域校正;3.8小结(上).mp4
(西工大)-第12节课3.6动态误差;3.7时域校正;3.8小结(下).mp4
(西工大)-第13节课根轨迹法4.1基本概念4.2法则1-4(下).mp4
(西工大)-第14节课4.2绘制根轨迹的基本法则5-8(上).mp4
(西工大)-第15节课4.3广义根轨迹(上).mp4
(西工大)-第15节课4.3广义根轨迹(下).mp4
(西工大)-第16节课4.4利用根轨迹分析系统性能;4.5小结(上).mp4
(西工大)-第16节课4.4利用根轨迹分析系统性能;4.5小结(下).mp4
(西工大)-第17节课5线性系统的频域分析与校正5.1频率特性5.2.1典型环节幅相特性(上).mp4
(西工大)-第17节课线性系统的频域分析与校正5.1频率特性5.2.1典型环节幅相特性(下).mp4
(西工大)-第18节课5.2幅相频率特性(典型环节,开环系统)(上).mp4
(西工大)-第18节课5.2幅相频率特性(典型环节,开环系统)(下).mp4
(西工大)-第19节课5.3对数频率特性(典型环节)(上).mp4
(西工大)-第1节课自动控制的一般概念(上).mp4
(西工大)-第1节课自动控制的一般概念(下).mp4
(西工大)-第20节课5.3对数频率特性(开环系统)(上).mp4
(西工大)-第21节课5.4频域稳定判据(1)(上).mp4
(西工大)-第21节课5.4频域稳定判据(1)(下).mp4
(西工大)-第22节课5.4频域稳定判据(2);5.5稳定裕度(上).mp4
(西工大)-第23节课5.6利用开环对数幅频特性分析系统的性能(上).mp4
(西工大)-第23节课5.6利用开环对数幅频特性分析系统的性能(下).mp4
(西工大)-第24节课5.7闭环频率特性曲线的绘制5.8利用闭环频率特性分析系统的性能(上).mp4
(西工大)-第24节课5.7闭环频率特性曲线的绘制5.8利用闭环频率特性分析系统的性能(下).mp4
(西工大)-第25节课5.9.1相角超前校正(上).mp4
(西工大)-第25节课5.9.1相角超前校正(下).mp4
(西工大)-第26节课5.9.2相角滞后校正(上).mp4
(西工大)-第26节课5.9.2相角滞后校正(下).mp4
(西工大)-第27节课5.9.3-4滞后超前校正,pid校正;5.10小结(上).mp4
(西工大)-第28节课课程阶段总结(上).mp4
(西工大)-第28节课课程阶段总结(下).mp4
(西工大)-第29节课6线性离散系统的分析与校正6.1离散系统;6.2信号采样与保持(上).mp4
(西工大)-第2节课自动控制的一般概念(上).mp4
(西工大)-第2节课自动控制的一般概念(下).mp4
(西工大)-第30节课6.3z变换(上).mp4
(西工大)-第30节课6.3z变换(下).mp4
(西工大)-第31节课6.4离散系统的数学模型(上).mp4
(西工大)-第31节课6.4离散系统的数学模型(下).mp4
(西工大)-第32节课6.5稳定性分析(下).mp4
(西工大)-第33节课6.6稳态误差计算;6.7动态性能分析(上).mp4
(西工大)-第33节课6.6稳态误差计算;6.7动态性能分析(下).mp4
(西工大)-第34节课6.8模拟化校正;6.9数字校正;6.10小结(上).mp4
(西工大)-第34节课6.8模拟化校正;6.9数字校正;6.10小结(下).mp4
(西工大)-第35节课7非线性控制系统分析7.1非线性系统概述;7.2相平面法(1)(上).mp4
(西工大)-第35节课7非线性控制系统分析7.1非线性系统概述;7.2相平面法(1)(下).mp4
(西工大)-第36节课7.2相平面法(2)(上).mp4
(西工大)-第37节课7.3描述函数法(1)(上).mp4
(西工大)-第37节课7.3描述函数法(1)(下).mp4
(西工大)-第38节课7.3描述函数法(2);7.4改善非线性系统性能的措施;7.5小结(上).mp4
(西工大)-第38节课7.3描述函数法(2);7.4改善非线性系统性能的措施;7.5小结(下).mp4
(西工大)-第39节课课程总结(上).mp4
(西工大)-第39节课课程总结(下).mp4
(西工大)-第3节课控制系统的数学模型(上).mp4
(西工大)-第40节课课程总复习(上).mp4
(西工大)-第40节课课程总复习(下).mp4
(西工大)-第4节课复习l反变换;2.3.1传递函数(上).mp4
(西工大)-第4节课复习l反变换;2.3.1传递函数(下).mp4
(西工大)-第5节课2.3控制系统的复域数学模型(上).mp4
(西工大)-第5节课2.3控制系统的复域数学模型(下).mp4
(西工大)-第6节课2.4结构图及其等效变换(上).mp4
(西工大)-第6节课2.4结构图及其等效变换(下).mp4
(西工大)-第7节课2.5信号流图;2.6系统传递函数;2.7小结(下).mp4
(西工大)-第8节课3线性系统的时域分析与校正3.1-3.3一阶,过阻尼二阶系统动态性能(上).mp4
(西工大)-第8节课3线性系统的时域分析与校正3.1-3.3一阶,过阻尼二阶系统动态性能(下).mp4
(西工大)-第9节课3.3.3欠阻尼二阶系统动态性能指标计算(上).mp4
自动控制课程相关介绍及设计原理资料.pdf





